FIBOT 4X Manual
PoweringUp
Before Powering Up
- ⚠️⚠️⚠️ Make sure that the arms are in a poper location before powering up. Upon boot up, the arms will try to go back to their initial position, if not in poper location it could hurt you.

PowerUp
- Press the power button, and the robot will boot automatically

Try Out
When the bot successfully boots, the images from the RGBD camera will shou up on the screen. And all leds on the arm will turn green.
PLEASE make sure you WAIT for the leds to turn green. Do NOT move the arms before it's ready or people might get hurt.
Opreate the arm
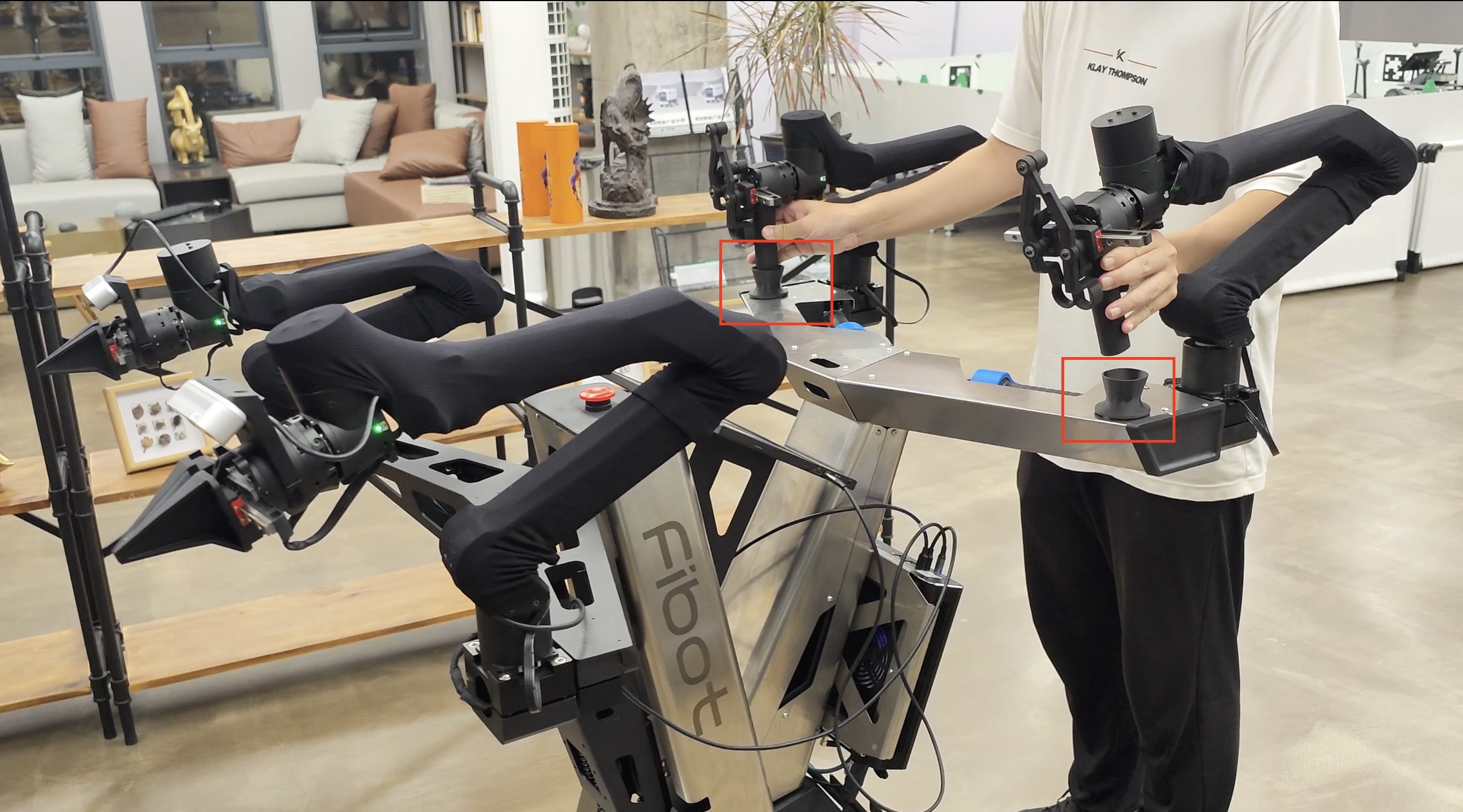
The robot is equipped with a mechanical arm base, allowing users to conveniently place the mechanical arm on the base to prevent it from moving randomly.
Move the robot around
To move the robot around, you don't have to use a remote(You can if you want though). Just grab the hand rail, and push/pull the robot anywhere you want. In free movement mode, you can move the robot forward and backward, left and right, and rotate it freely.

Use the arm lifter
We have designed a lifting platform for the mechanical arm to expand its workspace. You can use the blue rotary button on the handle to control the height of the lifting platform.
The lifting platform dramatically increased the workspace of the mechanical arm, enabling vertical opreation.


Developing
Where is the code
Currently, the PC has a debian installed. ROS is running inside docker images.
Using docker has obvious advantanges
- Easily roll back to a known good state
- Run linux on latest hardware without drive issues(Old hardware + New Linux or New hardware + Old Linux tend to always have driver issue.)
- Mixing different ROS versions without any problem.
Curretly, this device has 3 docker containers on it
- arm container
- RGBD camera
- chasis control node
The docker file and contents inside are just laying on the disk. It's up to you to decide to keep using docker or not. Just read the docker file, it is reall easy to understand what's going on. If you somehow want to install a Ubuntu 20.04 (ROS2 is impossible because the Ark5 Arm does not support ROS2 yet) and run ROS bare metal, read the following instructions.
Getting HEXMOVE ROS SDK
Please visit https://docs.hexmove.cn/books/public-hexmove-docs/chapter/ros-sdk-user-guide for instructions on how to download and use the HEXMOVE ROS SDK.
Work Gracefully with the robot
We have a small platform so you could place keyboard/laptop on it, and dev like a pro.

