
Further Reading: CAN Bus Configuration
CAN Bus Principles
If you have not purchased products like IMUs or distance sensors that are independent of the chassis/robot, you do not need to read this section.
Prerequisites
The physical limitations of the CAN bus require that the ends of the CAN bus must be equipped with two 120-ohm termination resistors.
HEXMOVE CAN Configuration
All CAN devices in HexMove are CAN 2.0B, 500K. A typical usage scenario is shown in the following image:
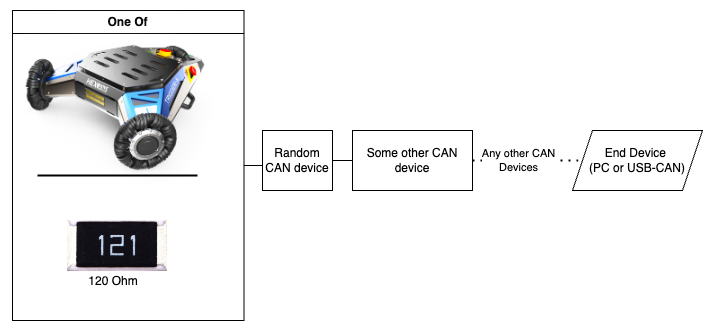
In the image above, the end device is typically an industrial computer or USB-to-CAN device of an industrial computer. Based on the above usage scenario, HEXMove has two types of devices that are by default fitted with 120 ohms:
All CAN adapters provided by HEXMove are set to default with 120 ohms on, which means that when using them, you only need to ensure that the last device connected is a CAN-HUB. If you are using your own CAN adapter, you need to ensure that the 120 ohms on the adapter are correctly connected.
However, if you are not using our chassis/navigation tower, it means that the CAN termination resistor shown on the left side of the image is missing. You will need to ensure that the other end also has a 120-ohm termination resistor, either by soldering or other means (such as hanging another CAN-HUB there purely for the purpose of providing 120 ohms).