快速使用指南
第一次使用设备请按以下步骤执行:
- 下载并查阅 产品用户手册和简化模型,特别是遥控器控制部分
- 将底盘架起,确保轮子都离开地面
- 打开底盘电源,听到蜂鸣声4声升调代表开机正常,观察电量显示是否正常
- 如果有遥控器请拨到CAN模式,切换模式请查阅产品用户手册
- 缓慢推动遥控器摇杆,观察运动是否正常
- 关闭电源,连接好CAN和电源线,请查阅 [标准CAN扩展接口]./XSTD/connection.md
- 使用ROS的用户请安装ROS包,请查阅 ROS-SDK
- 使用ROS的demo,请查阅 ROS-demo
- 如有测试需求,可以下载 测试系统XVIEW
- 直接使用CAN或者USB控制的用户请先查阅 [标准CAN协议]./XSTD/protocol.md,并配合XVIEW或者CAN分析仪使用,流程如下:
-
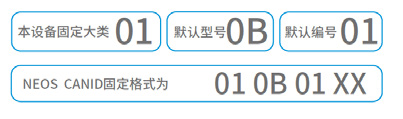
将产品用户手册中的型号和编号(默认为1)替换 [标准CAN协议](./XSTD/protocol.md中的对应部分,例如NEOS底盘ID如下图
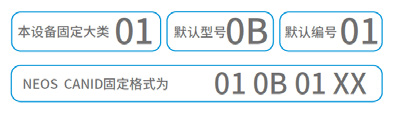
替换 [标准CAN协议](./XSTD/protocol.md中下面对应的型号和编号

-
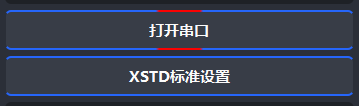
使用xview调试串口请先点击
XSTD标准设置再打开串口,然后直接填入数据发送标准消息即可,如下图:
-
计算校验和,参考协议手册3.1串口通讯协议部分。使用xview计算校验和,可以在 xview->工具->COM助手 页面的下面窗口直接输入,会自动算出SUM值,如下图

-
如果设备没有反应,可能是指令输入有误或错误更改了编号等参数,可通过xview直接示教:
- 请先确保遥控器关闭或切换至CAN模式,具体可在底盘手册里查看
- 连接好CAN-COM HUB到电脑,并重启设备
- 点击 xview->底盘->通讯消息
- 点击 连接->使能设备->CAN模式
- 拖动虚拟摇杆

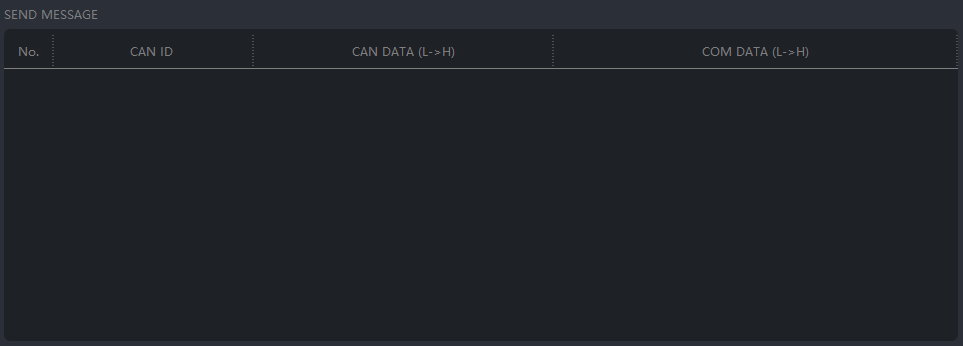
以上步骤可以参考前面的xview使用内容,确定底盘能运动后,观察SEND MESSAGE框内内容,每次点击按钮发出的指令都会在该处显示,可更具需要复制对应的到串口发送,如下图:
-