
ROS-SDK
安装Installing ROS 软件包Packages
提示Tip
有限支持的ROS版本:Limited support for ROS versions:Ubuntu 18.04 Melodic (
详细信息请见下方注释)see comments below for details)
支持的ROS版本范围:Supported ROS versions:Ubuntu 20.04
- ROS1: Noetic
- ROS2: Foxy, Galactic
Ubuntu 22.04
- ROS2: Humble, Iron
注意,Note,Ubuntu18.Ubuntu 18.04版本已经停止支持,version提供不再更新的zip存档供下载.is如果需要使用noUbuntu1804longer supported, a non-updating zip archive is available for download. If you need to use Ubuntu 18.04 ROSMelodic,部分硬件需要固件降级才可正常使用。请提前咨询售前,Melodic,避免购买的硬件不支持的情况.some hardware may require firmware downgrades to function properly. Please consult with sales in advance to avoid purchasing unsupported hardware.
警告Warning注意,Note,下载软件包之前,before需要先安装好downloadingROS.the并package, you need to have ROS installed and source你所需要使用的版本.the否则下载的软件包将version you need to use. Otherwise, the downloaded package will无法使用not be usable.
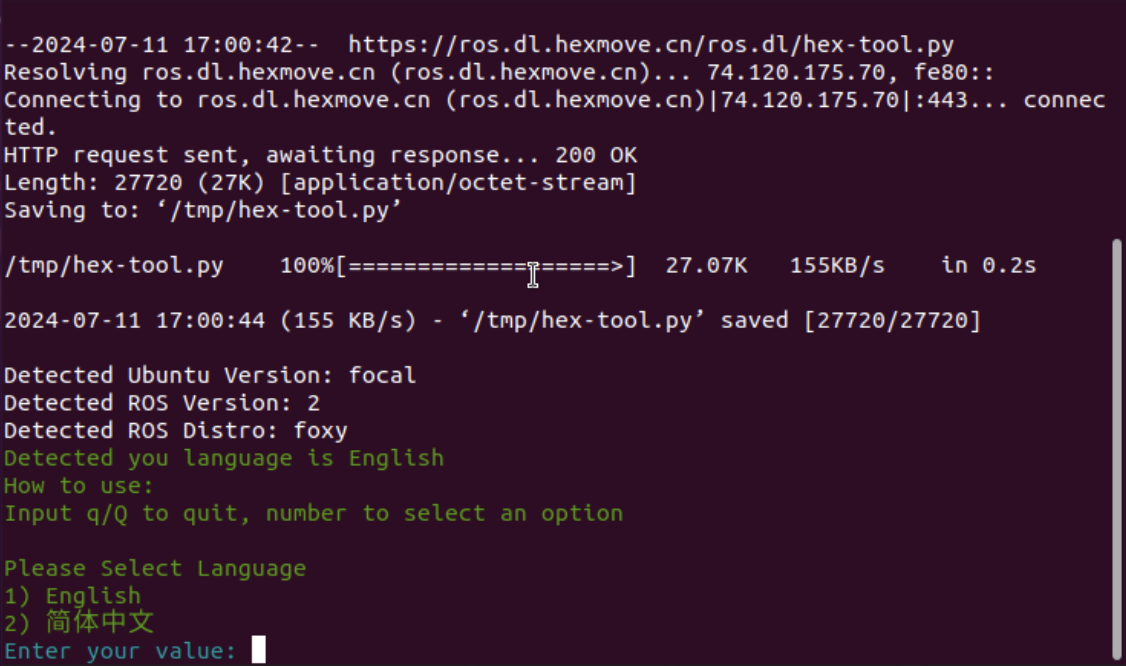
在你想要安装SDK的路径,In 打开终端输入以下命令the path where you want to install the SDK, open the terminal and enter the following command:
wget -O hextool.bash https://ros.dl.hexmove.cn/ros.dl/hextool.bash && bash hextool.bash
提示Tip为防止手敲命令敲错字符,To建议使用prevent typos when typing commands, it is recommended to use the browser that comes with Ubuntu所带的浏览器直接打开本网址,to并将命令从浏览器中复制到终端.open this website and copy the command from the browser to the terminal.
随后按照指引操作。Then follow the instructions.
选择语言Choose language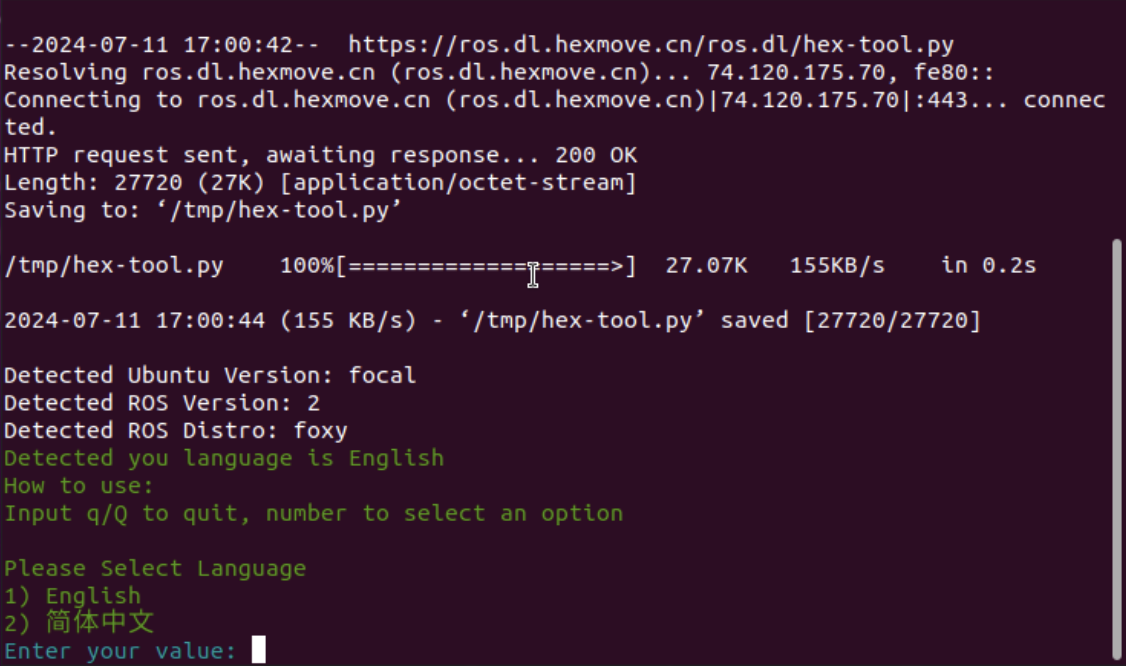
工具选择,Tool选择selection, choose1: Download SDK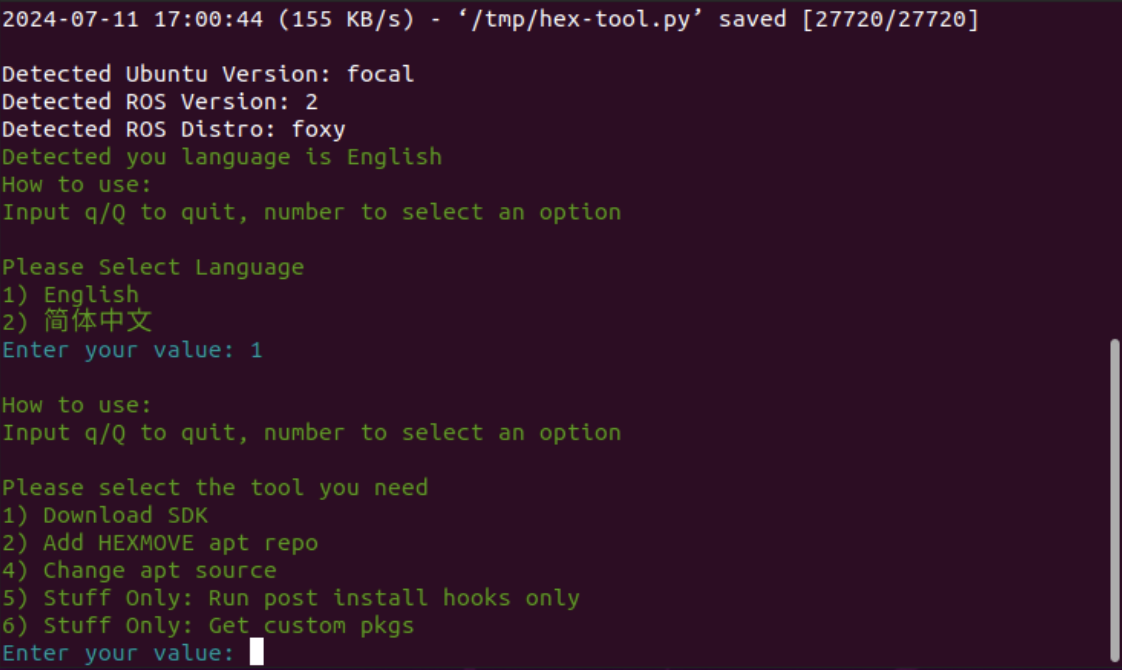

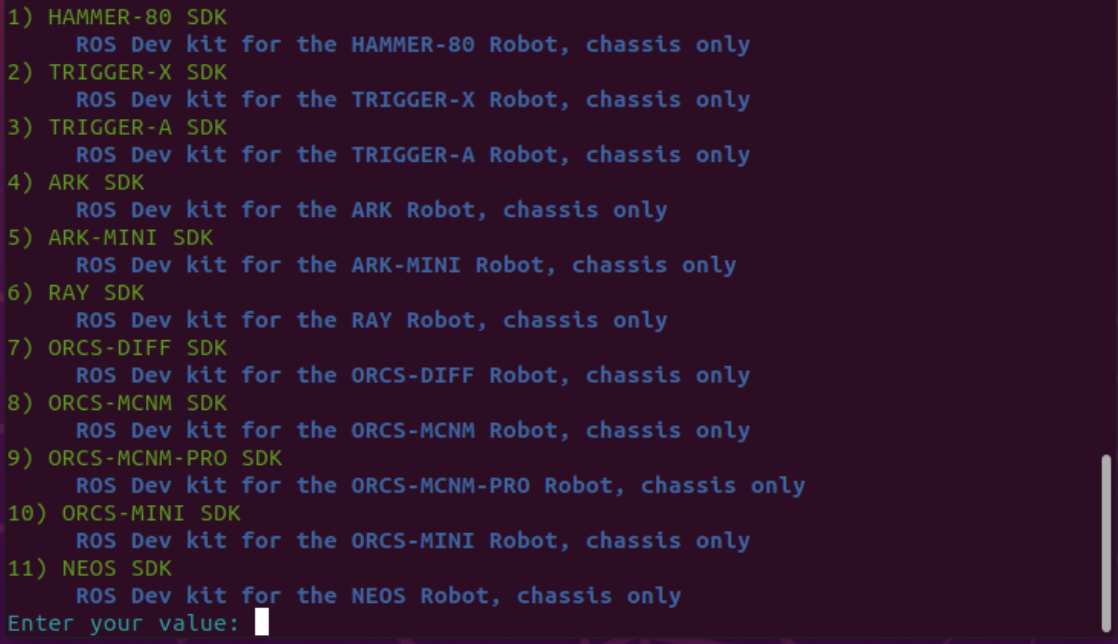
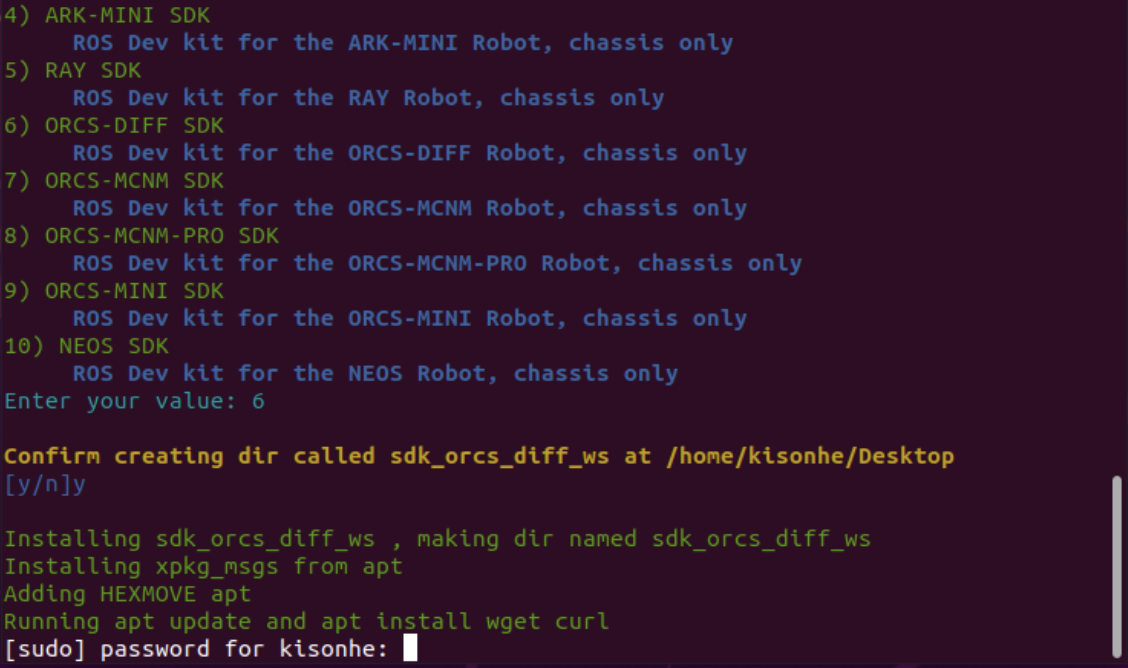
SDK选择,SDK选择你要下载的SDK。请根据实际购买的产品来选择。这里以selection, choose the SDK you want to download. Please select according to the product you actually purchased. Here is an example with ORCS-DIFF 为例。DIFF.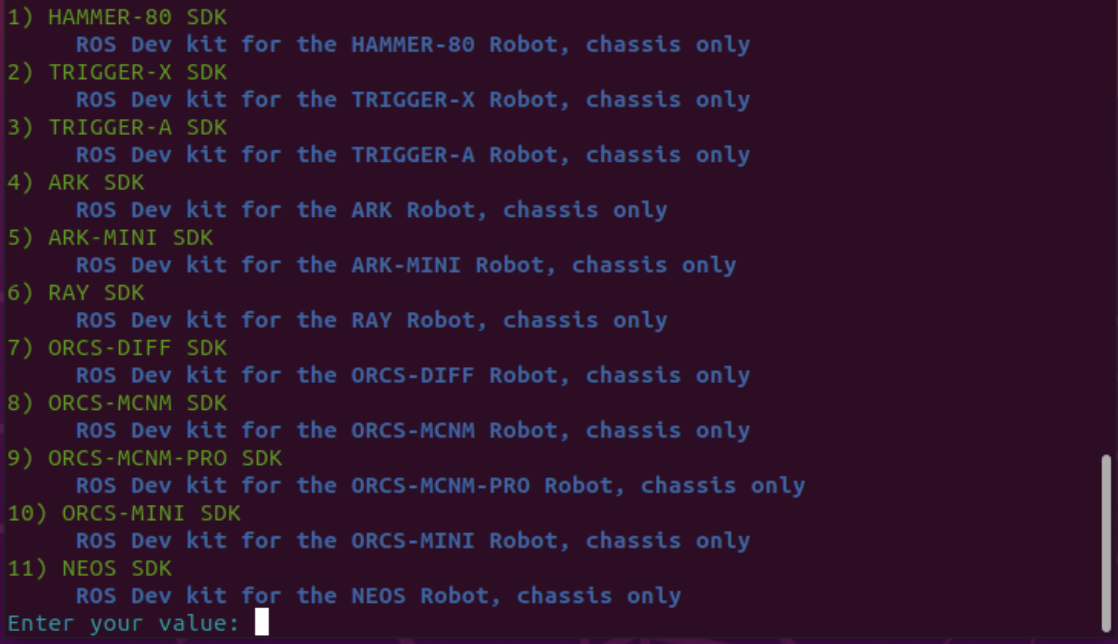
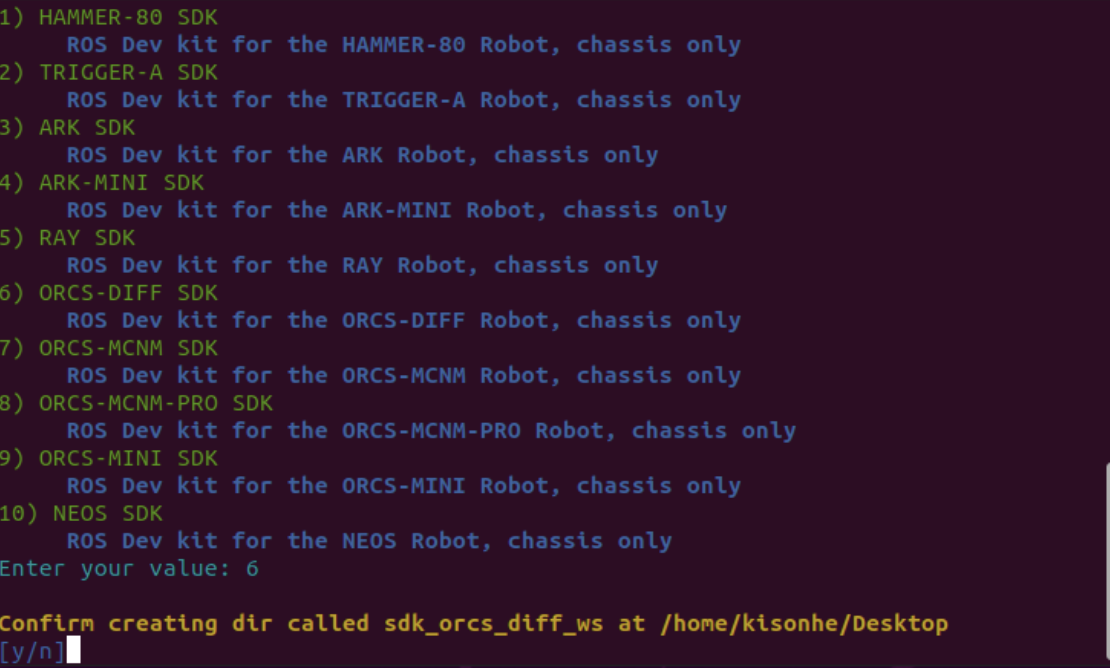
确认新建文件夹的位置是否正确Confirm the location of the new folder is correct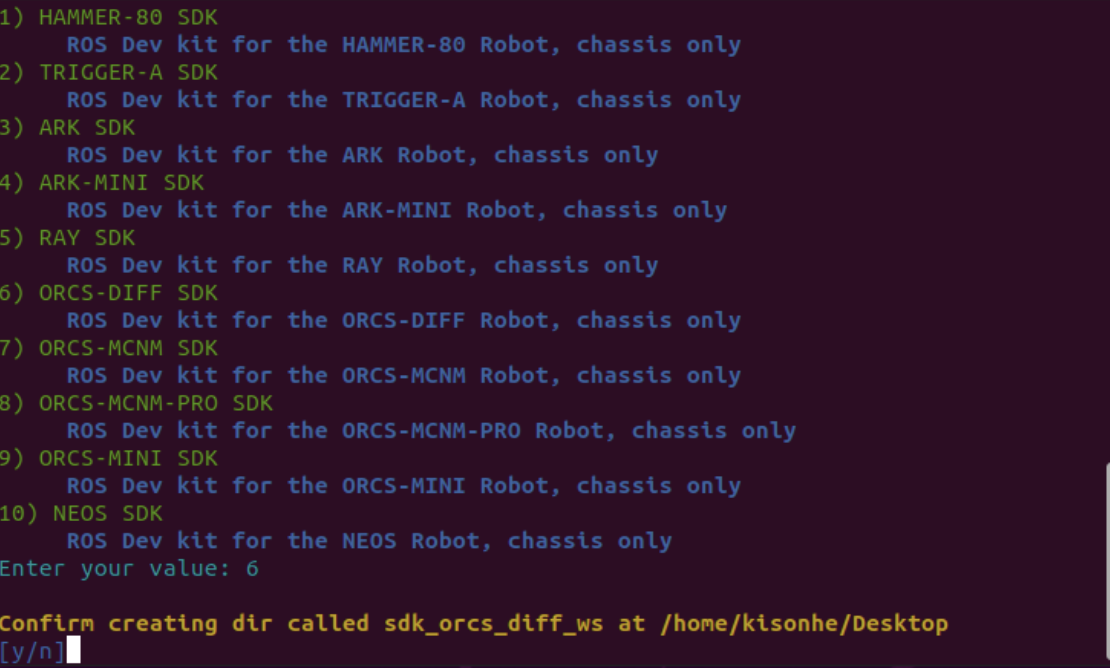
部分包需要通过SomeAPTpackages安装,输入密码完成安装。need to be installed via APT, enter the password to complete the installation.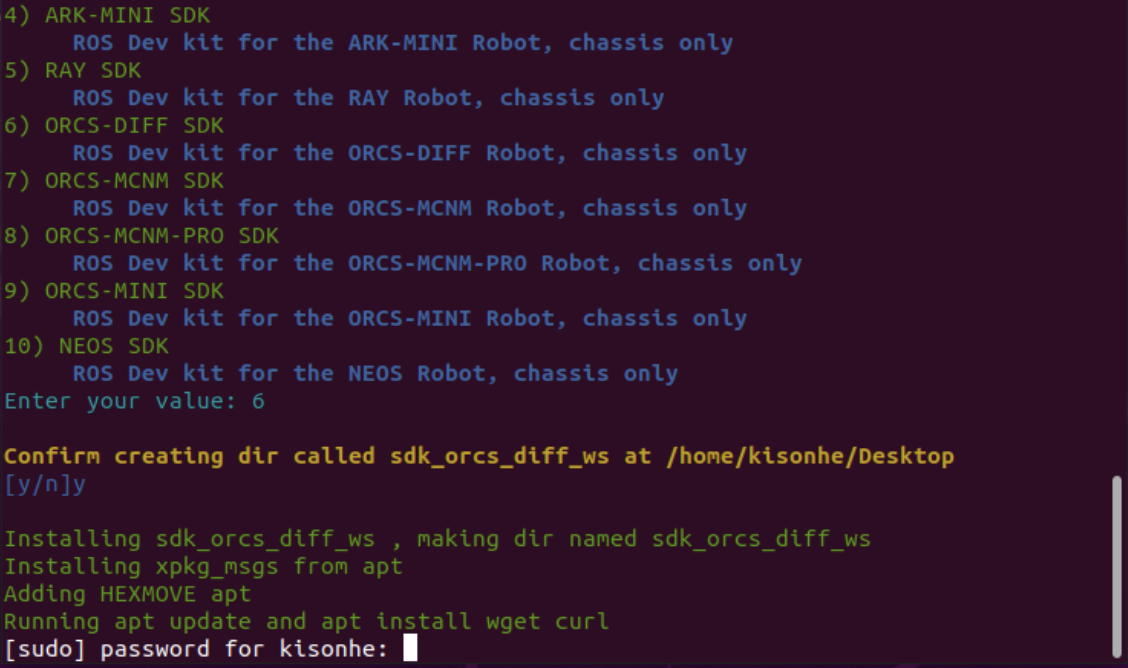
SDK下载完成SDK download completed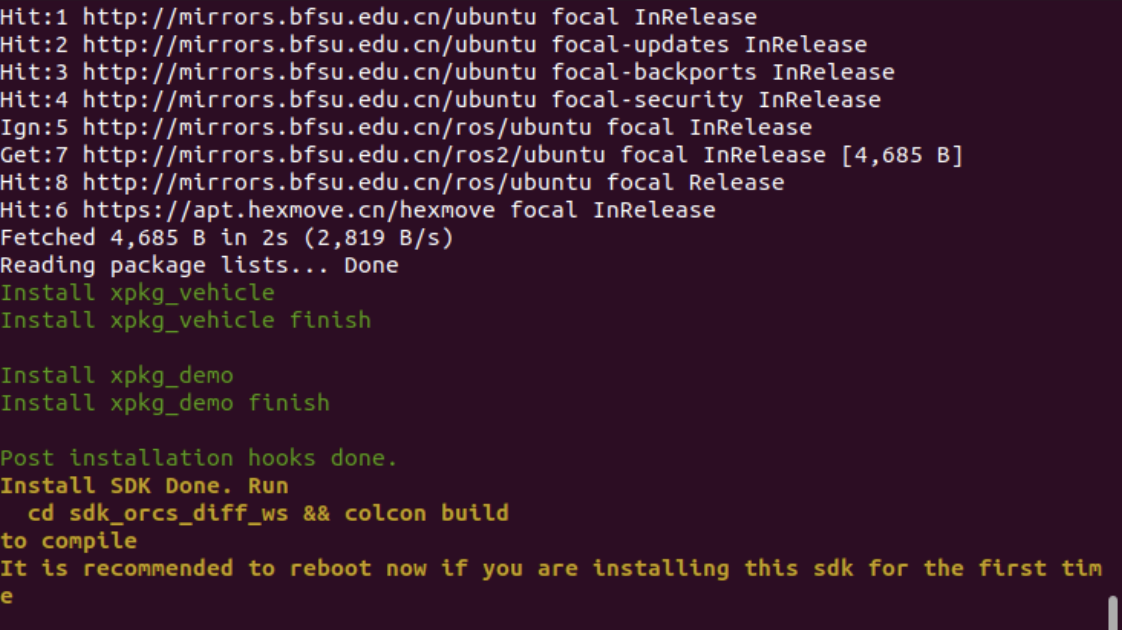
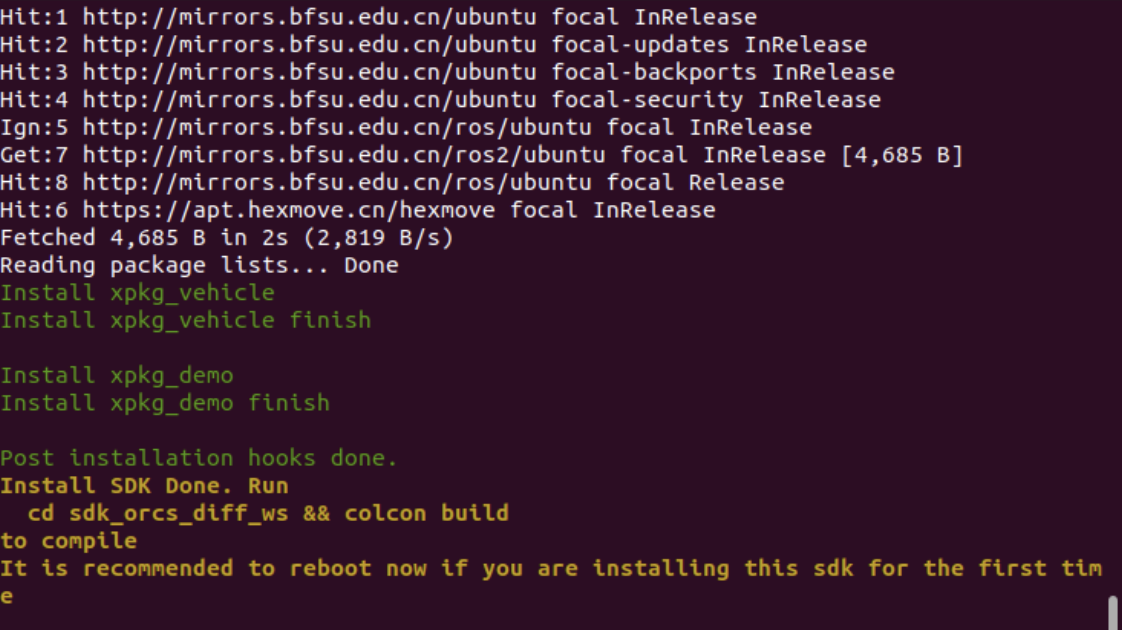
编译测试Compile test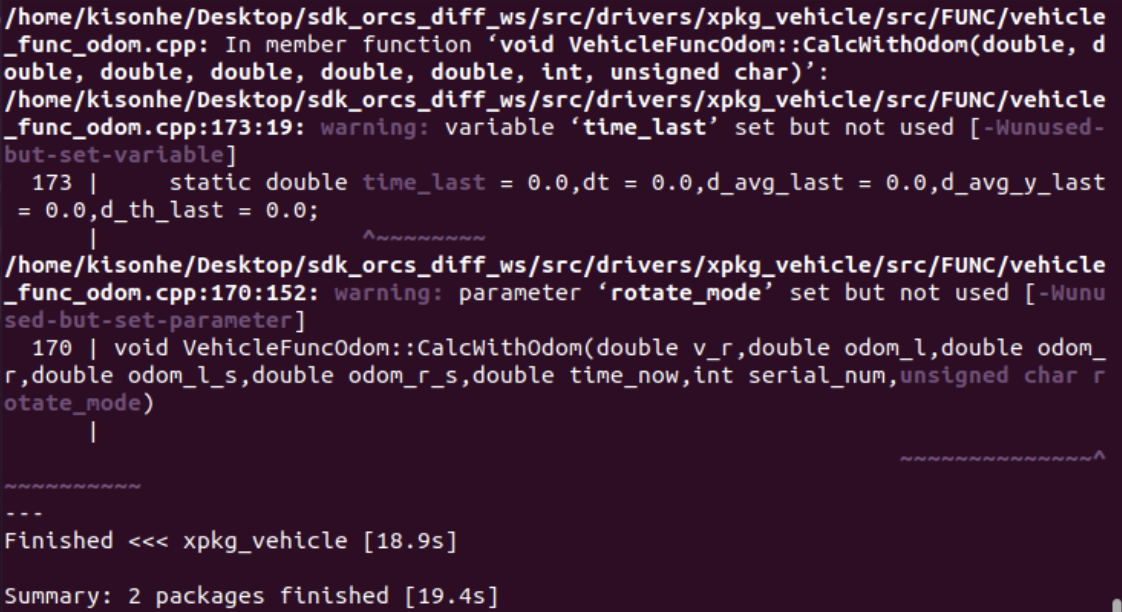

SDK软件包结构说明SDK Package Structure Description
各个软件包大同小异,The 这里以packages are similar, here is an example with ORCS-DIFF 为例.DIFF.
root@1c2edac84f0b:~# tree -d -L 5
.
└── sdk_orcs_diff_ws
└── src
├── demo
│ └── demo_general_chassis
│ ├── demo_vehicle
│ └── tools
└── drivers
└── xpkg_vehicle
├── include
├── ini
├── launch
├── scripts
├── src
└── tools
14 directories
- demo
文件夹:folder:存放Contains demo launch文件,files,用户可以参考其中的内容编写自己的users can refer to them to write their own launch文件.files.
警告Warning注意,Note, the launch files in the demo文件夹中的folder are designed to only start one at a time. Do not launch文件均设计成为只能同时启动一个. 请不要同时multiple launch多个fileslaunch 文件simultaneously.
- drivers
文件夹:folder:基础机器人驱动软件Basic robot driver software, such as charging stations (if any),例如充电桩(如果有),chassis底盘控制等control, etc. - urdf
文件夹:folder:用来放Used to store URDF files 此外,另有两个包通过Inaptaddition,完成了安装two other packages were installed via apt:- ros-$ROS_DISTRO-xpkg-comm
负责与底盘间的物理通信。responsible for physical communication with the chassis. - ros-$ROS_DISTRO-xpkg-msgs
负责提供消息类型。responsible for providing message types.
- ros-$ROS_DISTRO-xpkg-comm
如果没有专业指导,If 请勿改动除了you are not professionally guided, do not modify any packages other than the demo 文件夹之外的任何软件包.folder.
使用SDK软件包Using the SDK Package
软件包提供了测试demo,请查阅The package provides a test demo, please refer to 使用ROS的demoUsing ROS Demo