
ROS-SDK
Installing ROS Packages
Tip
Limited support for ROS versions:
Ubuntu 18.04 Melodic (see comments below for details)
Supported ROS versions:
Ubuntu 20.04
- ROS1: Noetic
- ROS2: Foxy, Galactic
Ubuntu 22.04
- ROS2: Humble, Iron
Note, Ubuntu 18.04 version is no longer supported, a non-updating zip archive is available for download. If you need to use Ubuntu 18.04 ROS Melodic, some hardware may require firmware downgrades to function properly. Please consult with sales in advance to avoid purchasing unsupported hardware.
Warning Note, before downloading the package, you need to have ROS installed and source the version you need to use. Otherwise, the downloaded package will not be usable.
In the path where you want to install the SDK, open the terminal and enter the following command:
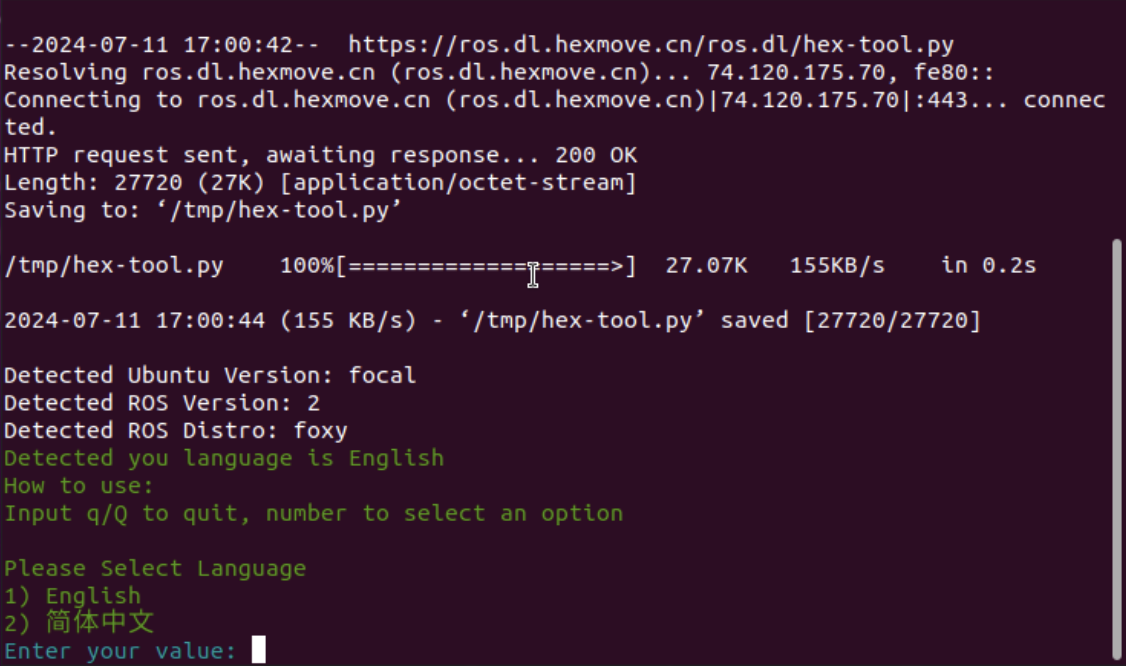
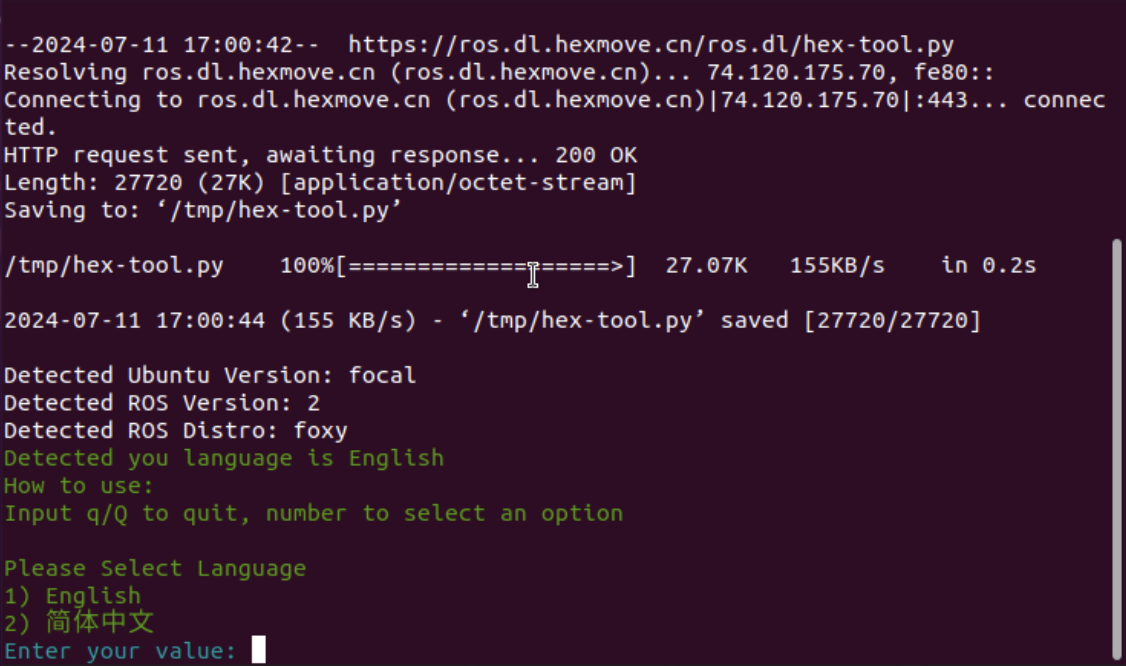
wget -O hextool.bash https://ros.dl.hexmove.cn/ros.dl/hextool.bash && bash hextool.bash
Tip To prevent typos when typing commands, it is recommended to use the browser that comes with Ubuntu to open this website and copy the command from the browser to the terminal.
Then follow the instructions.
- Choose language
- Tool selection, choose
1: Download SDK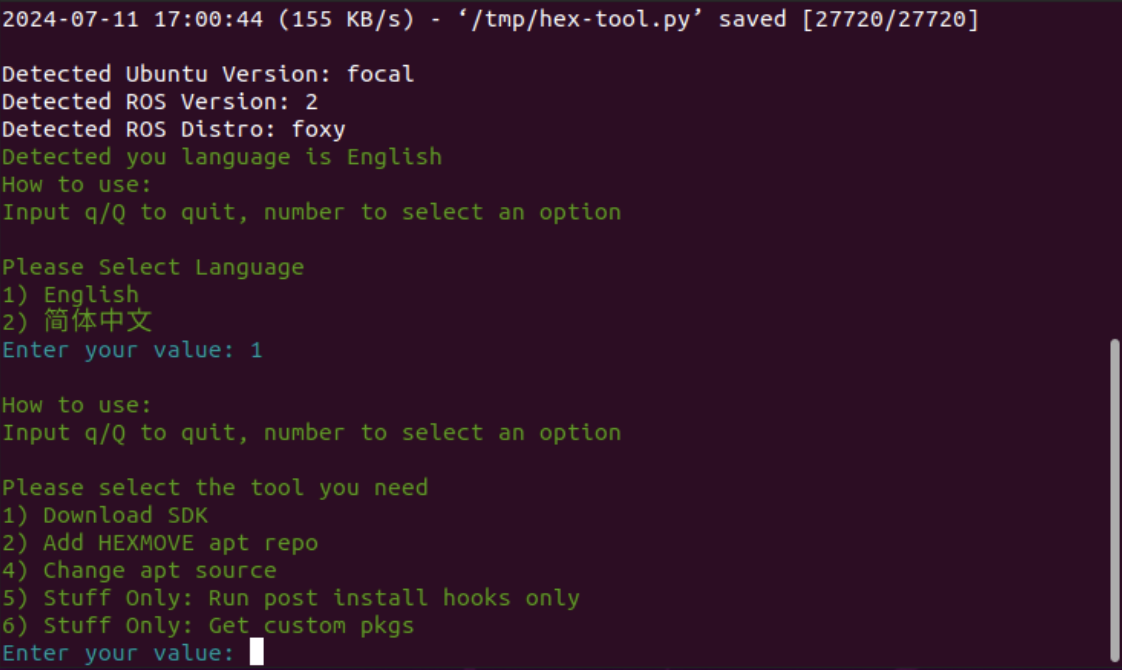

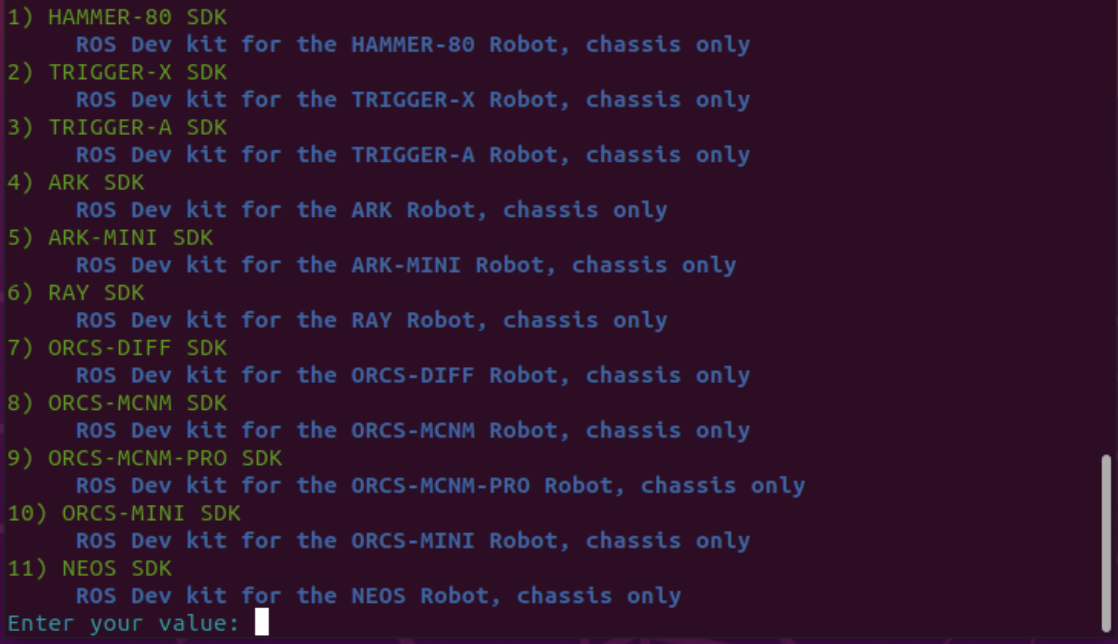
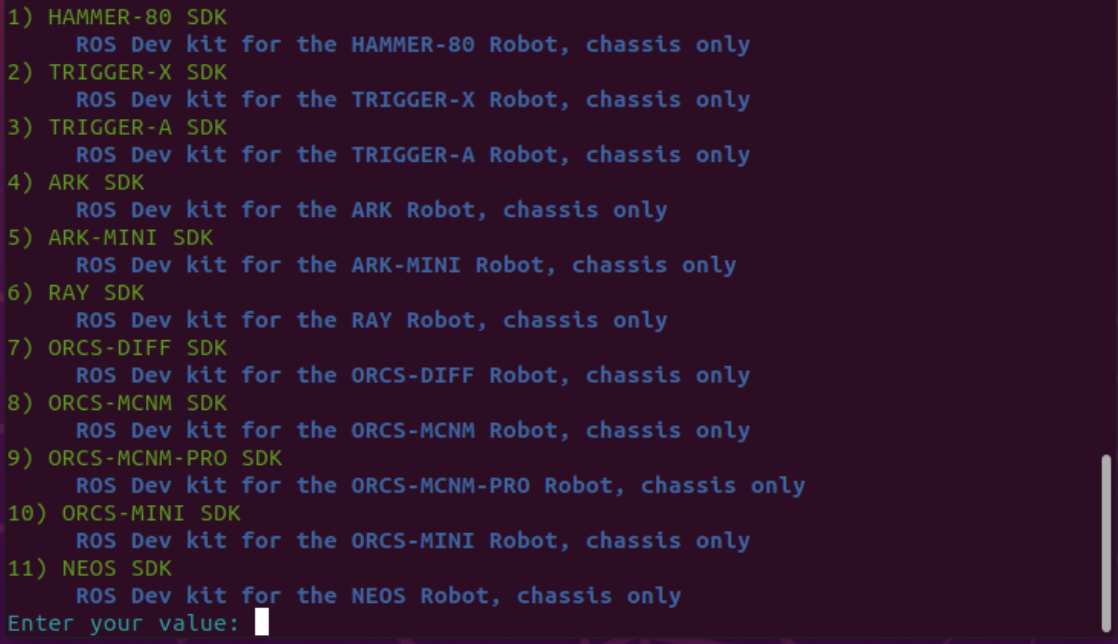
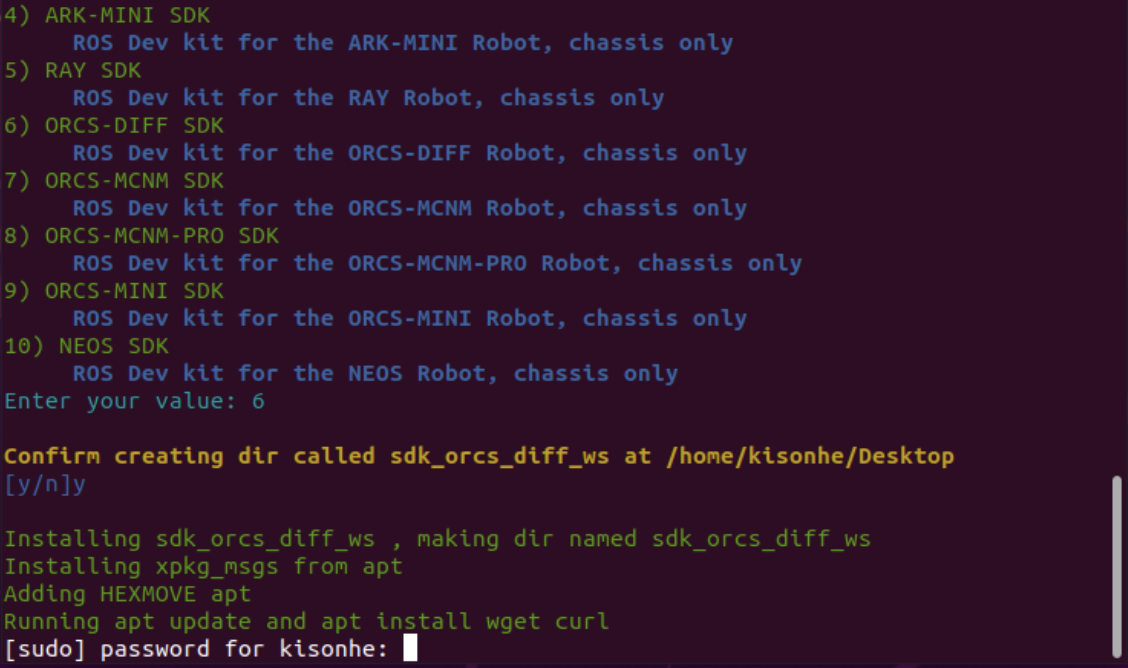
- SDK selection, choose the SDK you want to download. Please select according to the product you actually purchased. Here is an example with ORCS-DIFF.
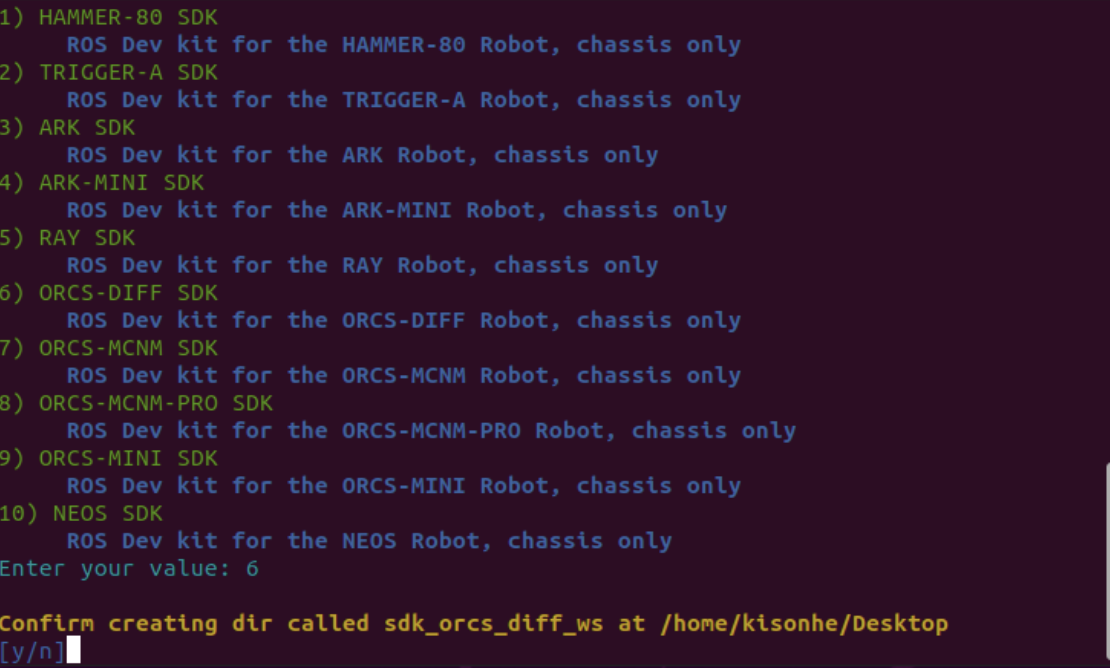
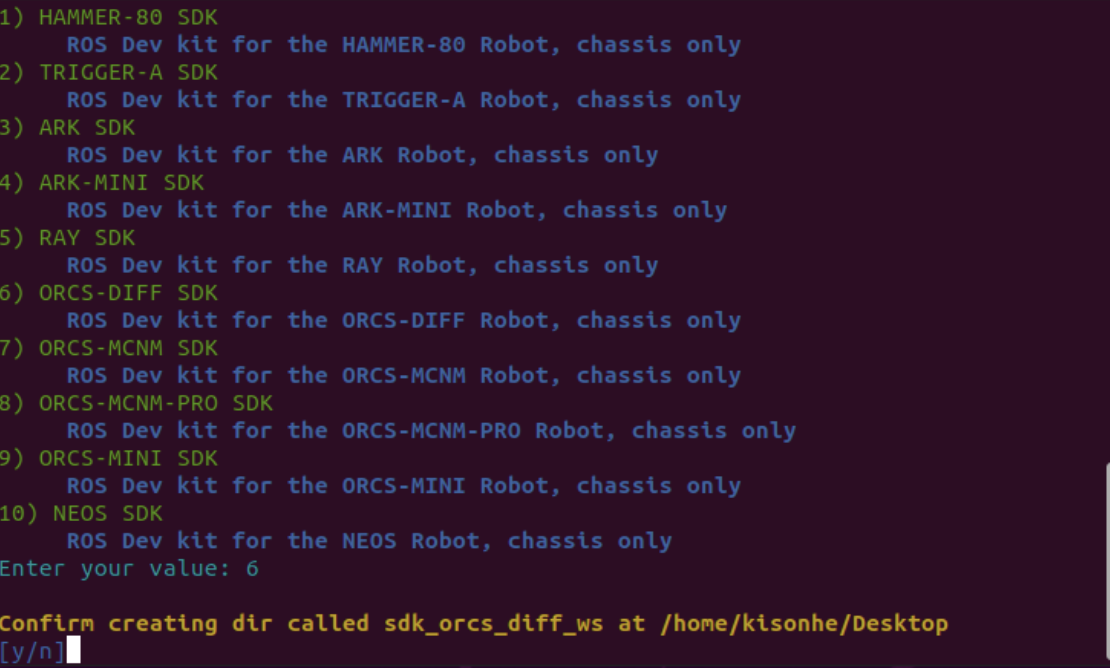
- Confirm the location of the new folder is correct
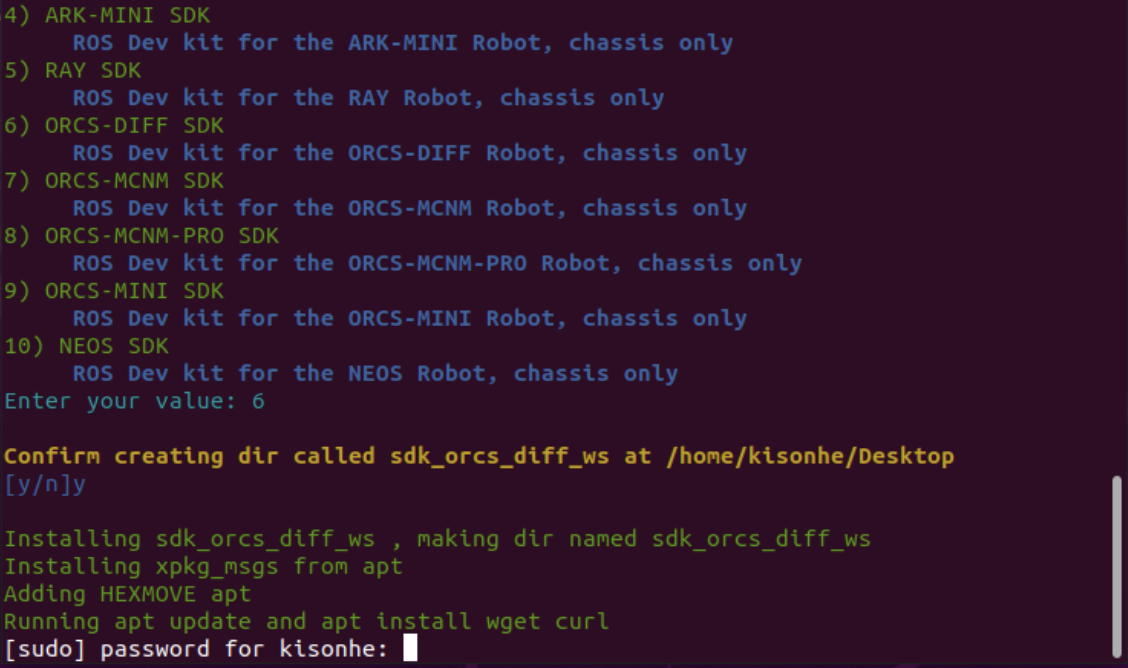
- Some packages need to be installed via APT, enter the password to complete the installation.
- SDK download completed
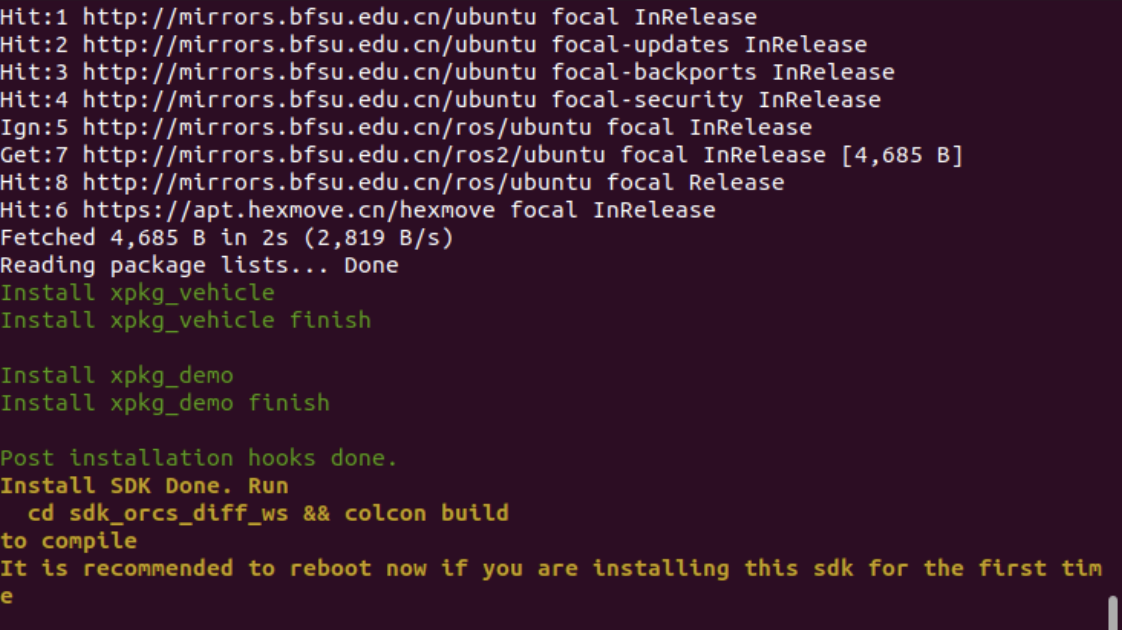
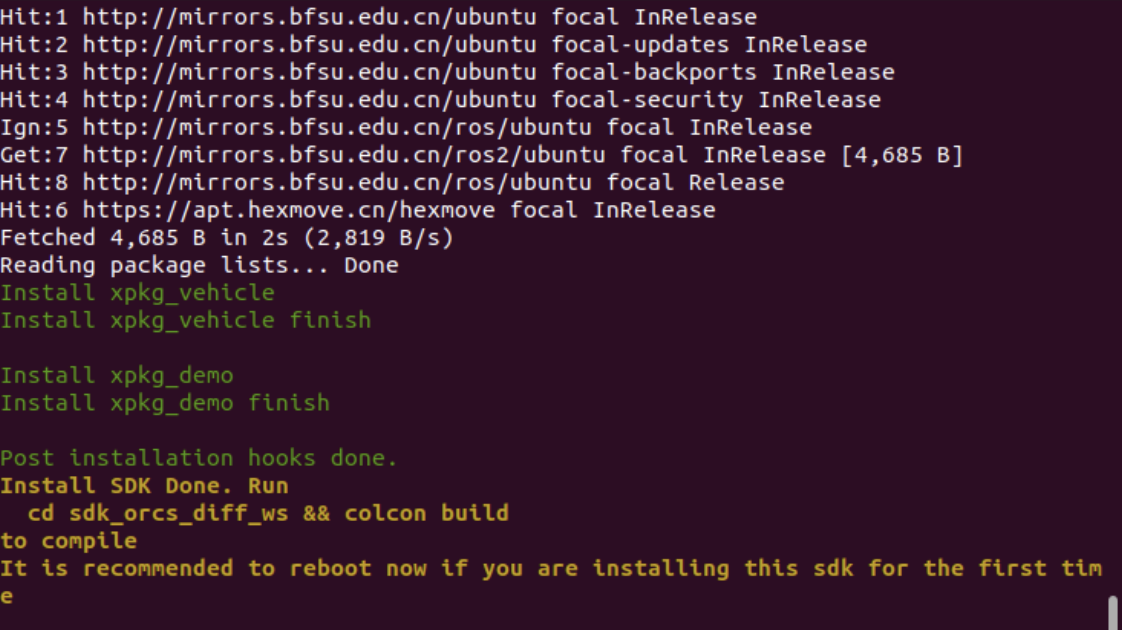
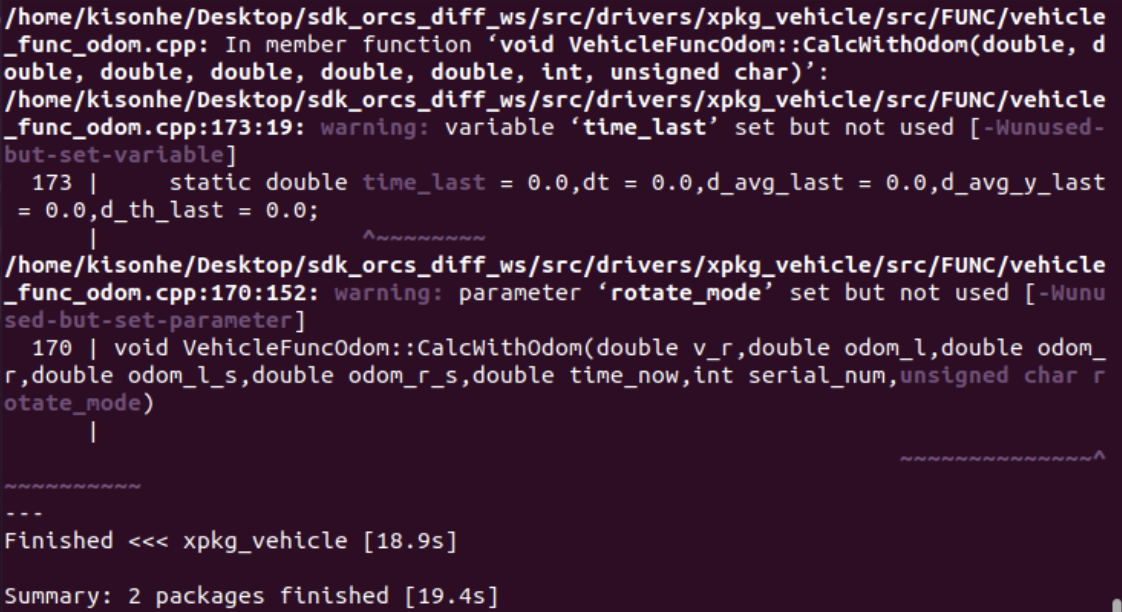
- Compile test

SDK Package Structure Description
The packages are similar, here is an example with ORCS-DIFF.
root@1c2edac84f0b:~# tree -d -L 5
.
└── sdk_orcs_diff_ws
└── src
├── demo
│ └── demo_general_chassis
│ ├── demo_vehicle
│ └── tools
└── drivers
└── xpkg_vehicle
├── include
├── ini
├── launch
├── scripts
├── src
└── tools
14 directories
- demo folder: Contains demo launch files, users can refer to them to write their own launch files.
Warning Note, the launch files in the demo folder are designed to only start one at a time. Do not launch multiple launch files simultaneously.
- drivers folder: Basic robot driver software, such as charging stations (if any), chassis control, etc.
- urdf folder: Used to store URDF files
- In addition, two other packages were installed via apt:
- ros-$ROS_DISTRO-xpkg-comm responsible for physical communication with the chassis.
- ros-$ROS_DISTRO-xpkg-msgs responsible for providing message types.
If you are not professionally guided, do not modify any packages other than the demo folder.
Using the SDK Package
The package provides a test demo, please refer to Using ROS Demo