
Rviz navigation plugin
该插件仅适用于ROS1版本
Marker setting

To set the size of the markers for target points, you can adjust the scale factor where 1.0 is the default value. Other numerical values represent the size multiplier. Remember to click "Set" to refresh all the markers.

The marker consists of two parts: the numerical part represents the sequence number of the target point, while the arrow part indicates the stopping direction of the target point.
Add goal
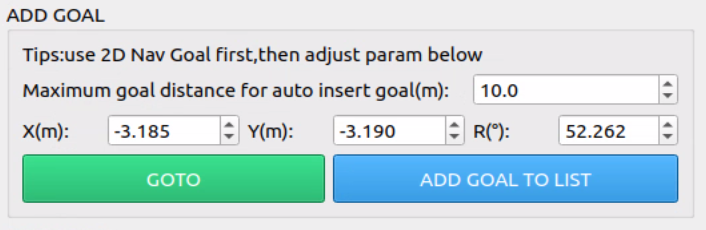
- 请先使用Rviz自带功能
 在地图上选取目标点
在地图上选取目标点 - 可通过输入X、Y、R值来微调坐标位置
- 如果需要直接前往目标点可点击 GOTO 按键
- 如果需要将目标加入到目标列表请点击 ADD GOAL TO LIST 按键
- 如果目标与目标列表上一个目标距离过远,会在列表中自动插入中间目标值,容忍的最大距离差可在上图中修改,默认是10m
目标列表管理
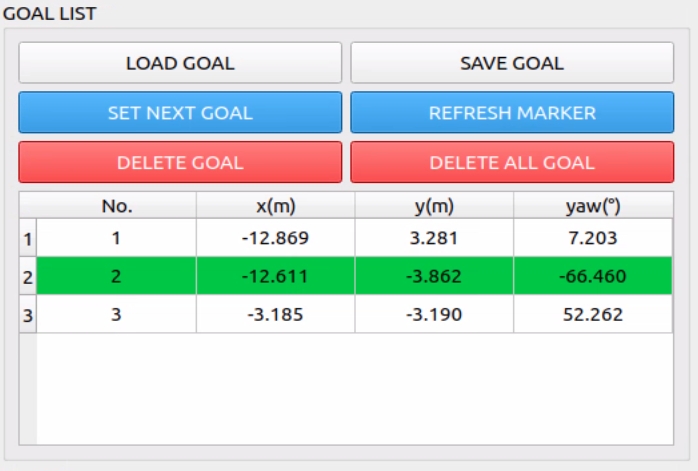
- 添加后的目标点会在该列表中显示,列表中参数可以直接编辑修改,修改完成后点击 REFRESH MARKER 按键刷新所有标识
- 列表中绿色行代表下一个要执行的目标点,如果要切换下一个目标,可在列表中选择对应行,点击 SET NEXT GOAL 按键切换
- LOAD GOAL 和 SAVE GOAL用于保存和载入列表,列表将保存在ini/memory.txt中,可以在文档中直接修改数据
- 如果要删除单一目标,选择对应行,点击 DELETE GOAL 按键即可
- 如果要清空目标列表,点击 DELETE ALL GOAL 按键即可
模式选择
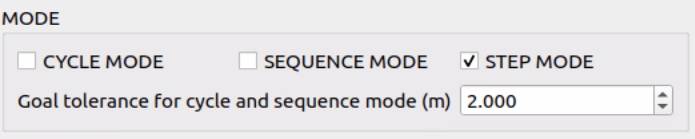
模式选择用于不同的列表目标点执行方式
| cycle mode | 循环模式,执行完最后一个目标点会继续执行第一个目标点 |
| sequence mode | 序列模式,执行完列表所有目标点会停止 |
| step mode | 单步模式,按列表顺序一次执行一个目标点 |
为了平滑路径可以调整Goal tolerance,进入目标点的该距离半径后会自动跳转到下一目标点,场景越小该值需要越小。该设置不影响最后的目标点到达
启动控制
- 默认情况列表会自上而下执行目标点,如果勾选 REVERSE 会反向执行目标点
- 使用 START 和 STOP 按键时由于系统问题可能需要多次点击,该控制按键只对列表中的目标点有效,启动后下一目标点信息会显示在 NEXT GOAL。