Quick Start Guide
第一次使用设备请按以下步骤执行:The steps to follow for the first-time use of the device:
下载并查阅Download and refer to the产品用户手册和简化模型product user manual and simplified model,特别是遥控器控制部分, especially the remote control section.将底盘架起,确保轮子都离开地面Lift the chassis up to ensure that all wheels are off the ground.打开底盘电源,听到蜂鸣声4声升调代表开机正常,观察电量显示是否正常Turn on the chassis power. If you hear four consecutive beeps indicating a successful startup, check if the battery level display is ok.如果有遥控器请拨到CAN模式,切换模式请查阅If you have a remote controller, switch it to the CAN mode. For instructions on how to switch modes, please refer to the产品用户手册product user manual.缓慢推动遥控器摇杆,观察运动是否正常Slowly push the remote controller joystick and observe if the motion is right.关闭电源,连接好CAN和电源线,请查阅Turn[标准CAN扩展接口]off the power, connect the CAN and power lines properly, please refer to Standard CAN Extended Interface and CAN bus configuration./XSTD/connection.md使用ROS的用户请安装ROS包,请查阅Users who use ROS please install the ROS package, please refer to the ROS-SDK.使用ROS的demo,请查阅Please refer to the ROS-demo for using demos with ROS.如有测试需求,可以下载If there are testing requirements, you can download the测试系统XVIEW testing system.直接使用CAN或者USB控制的用户请先查阅For[标准CAN协议]./XSTD/protocol.md,并配合XVIEW或者CAN分析仪使用,流程如下:users- who
- directly
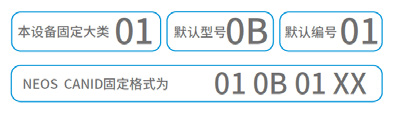
CAN将产品用户手册中的型号和编号(默认为1)替换use[标准CAN协议](./XSTD/protocol.md中的对应部分,例如NEOS底盘ID如下图or USB control, please refer to the
and替换first,[标准CAN协议](./XSTD/protocol.md中下面对应的型号和编号
use XVIEW
XVIEW - or
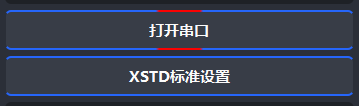
a使用xview调试串口请先点击XSTD标准设置再打开串口,然后直接填入数据发送标准消息即可,如下图:
CAN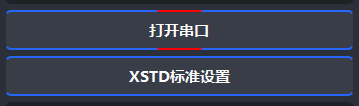 analyzer
analyzer - in
计算校验和,参考协议手册3.1串口通讯协议部分。使用xview计算校验和,可以在conjunctionxview->工具->COM助手with页面的下面窗口直接输入,会自动算出SUM值,如下图
如果设备没有反应,可能是指令输入有误或错误更改了编号等参数,可通过xview直接示教:请先确保遥控器关闭或切换至CAN模式,具体可在底盘手册里查看连接好CAN-COM HUB到电脑,并重启设备点击 xview->底盘->通讯消息点击 连接->使能设备->CAN模式拖动虚拟摇杆

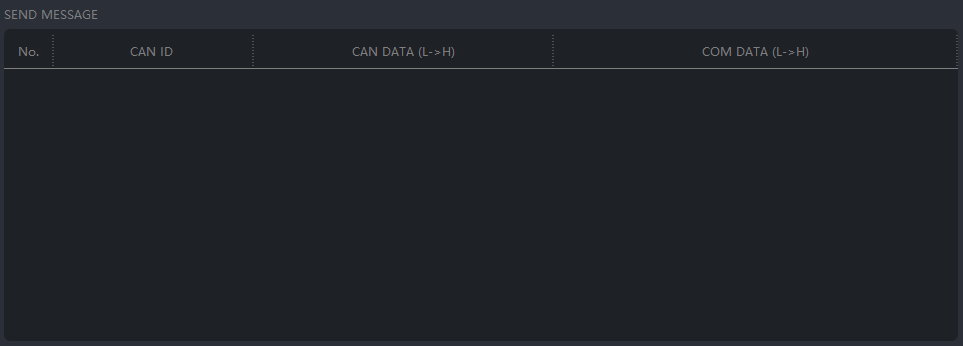
以上步骤可以参考前面的xview使用内容,确定底盘能运动后,观察SEND MESSAGE框内内容,每次点击按钮发出的指令都会在该处显示,可更具需要复制对应的到串口发送,如下图: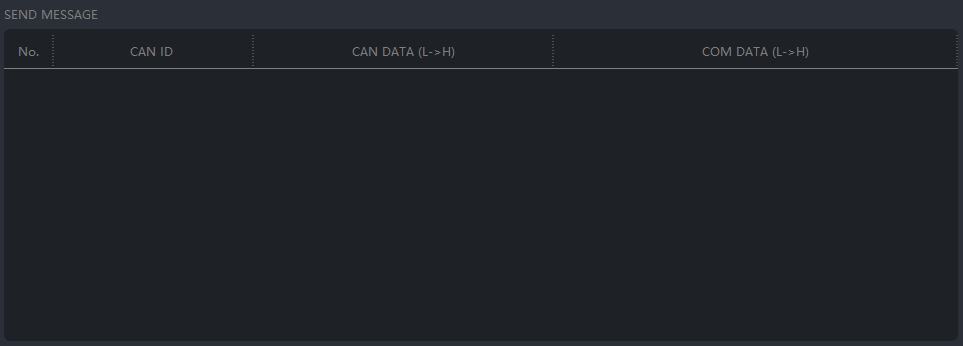
- directly